Výsledky
Textové výstupy
- Bakalárska práca (WIP, naposledy aktualizované 13.5.2024)
- Článok na konferenciu KUŽ/CAL
Výsledky z experimentov
Experiment 1: Učenie sa kinematiky
- Pomocou robota Franka Emika Panda
- Úloha kategórie 1 kategorizácie robotickej kauzálnej kognície ( Citation: Hellström, 2021 Hellström, T. (2021). The relevance of causation in robotics: A review, categorization, and analysis. Paladyn, Journal of Behavioral Robotics, 12(1). 238–255. https://doi.org/10.1515/pjbr-2021-0017 )
Generovanie syntetických dát
-
Distribúcie generovaných pozorovaní
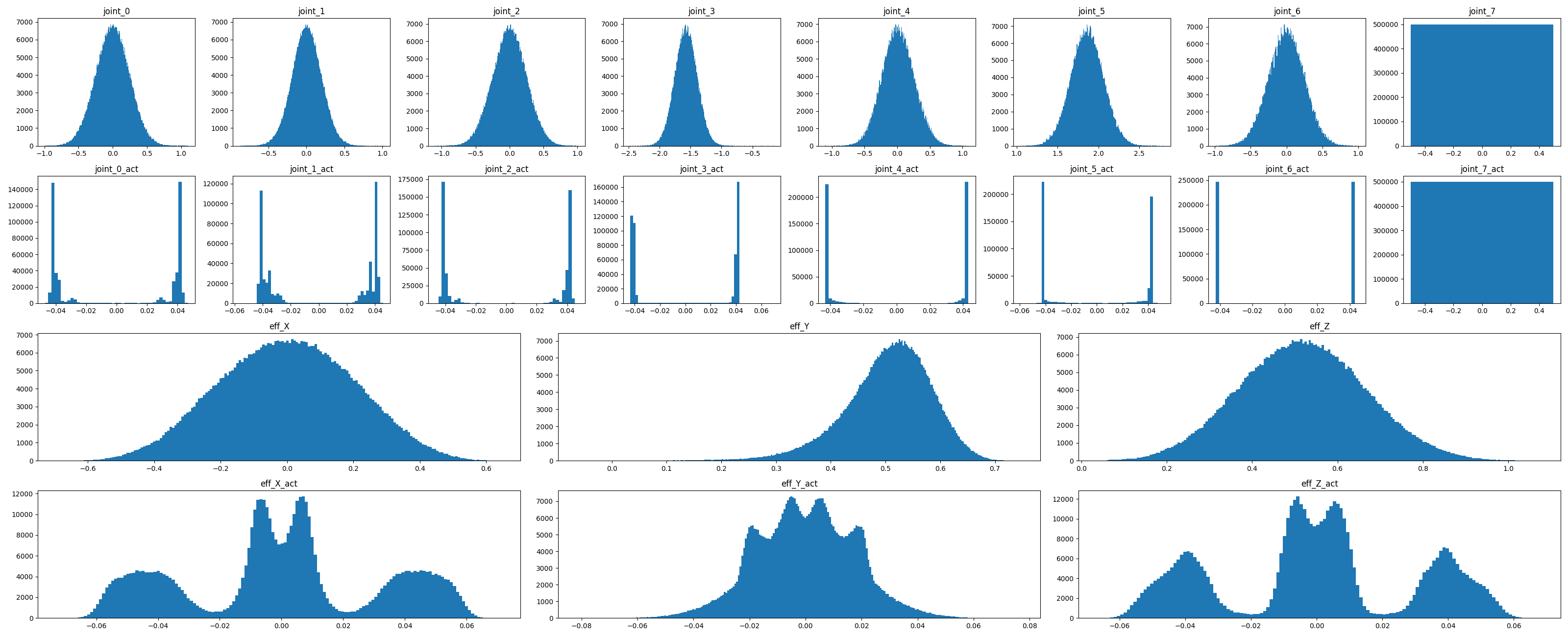
-
3D pozície efektora počas generovania zredukované do 2D pomocou UMAP [interaktívna vizualizácia]
-
7D kĺbové konfigurácie počas generovania zredukované do 2D pomocou UMAP [interaktívna vizualizácia]
Modelovanie
-
Architektúra dopredného modelu

-
Monolitická architektúra inverzného modelu

-
Kompozitná architektúra inverzného modelu

-
Chybovosť mentálnej simulácie dopredného modelu

Experiment 2: Učenie sa intuitívnej fyziky
- Pomocou robota Kuka s magnetickým efektorom
- Úloha kategórie 2 kategorizácie robotickej kauzálnej kognície ( Citation: Hellström, 2021 Hellström, T. (2021). The relevance of causation in robotics: A review, categorization, and analysis. Paladyn, Journal of Behavioral Robotics, 12(1). 238–255. https://doi.org/10.1515/pjbr-2021-0017 )
Generovanie syntetických dát
-
Pozície efektora počas generovania
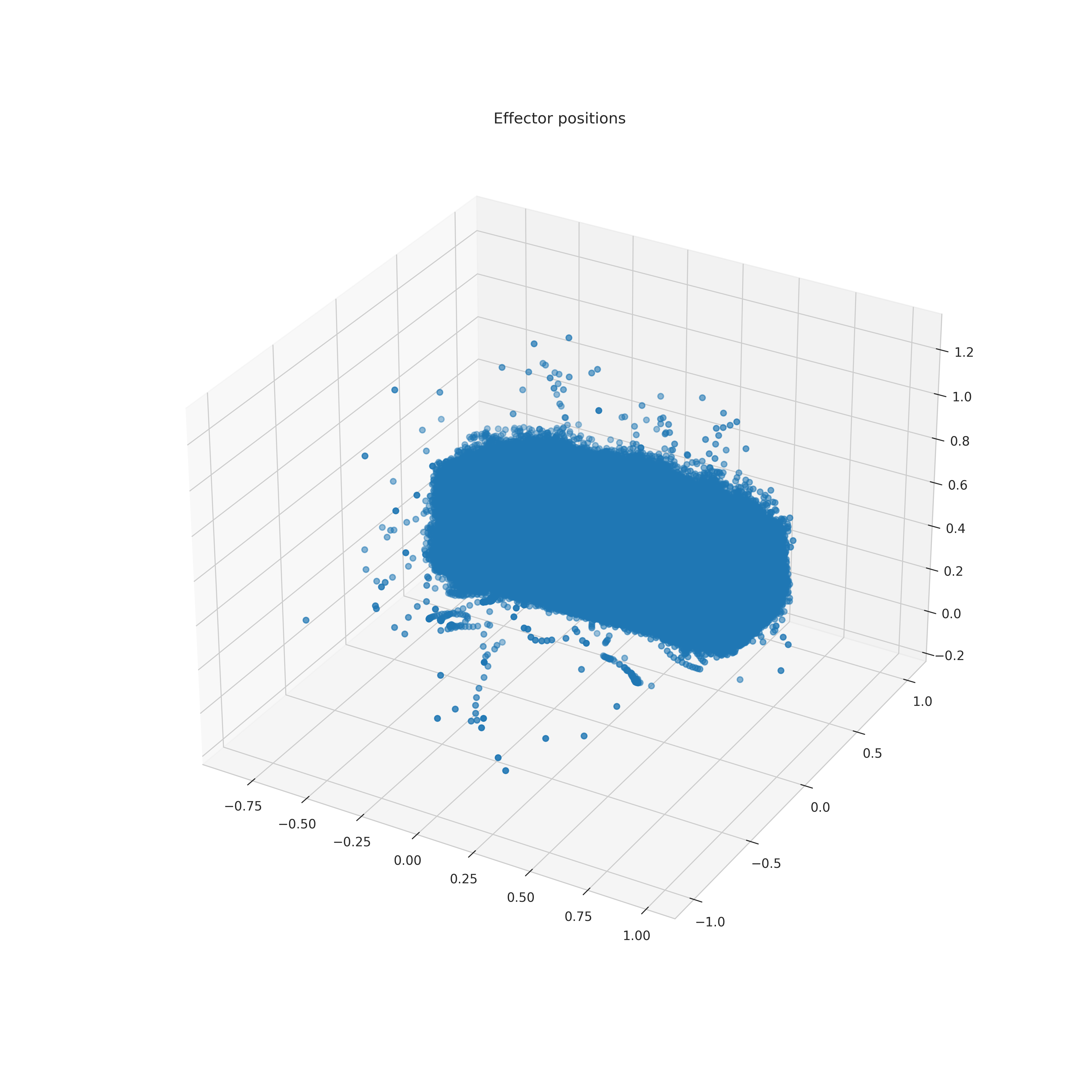
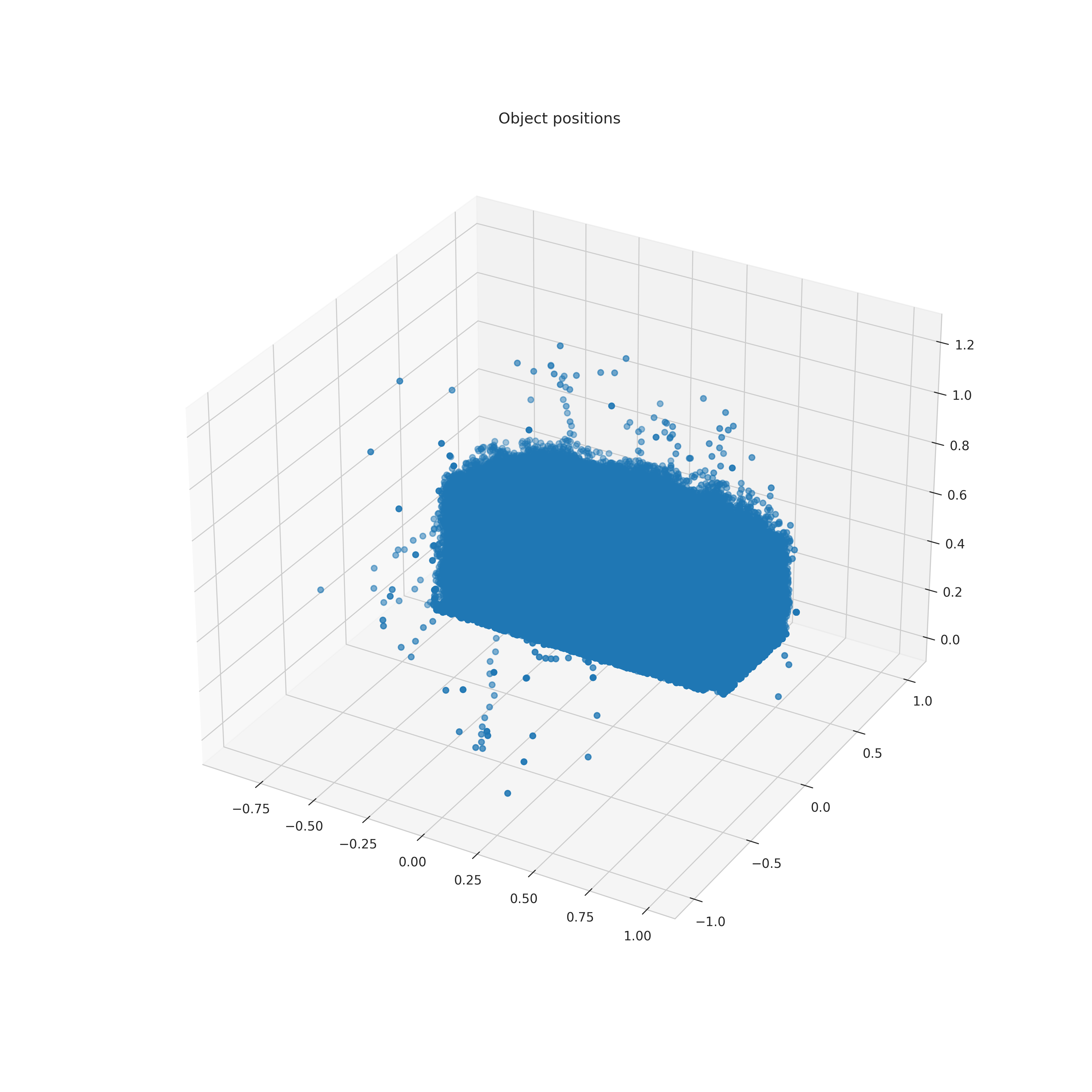
-
Pozície objektu počas generovania
Analýza dopredného modelu
-
Tepelná mapa korelácie medzi stavovými a akčnými premennými v čase $t$ a $t+1$

-
Výrez tepelnej mapy vyššie zameraný na efekt akčných premenných

-
Taxonómia distribúcií vo vzťahoch medzi akčnými a stavovými premennými
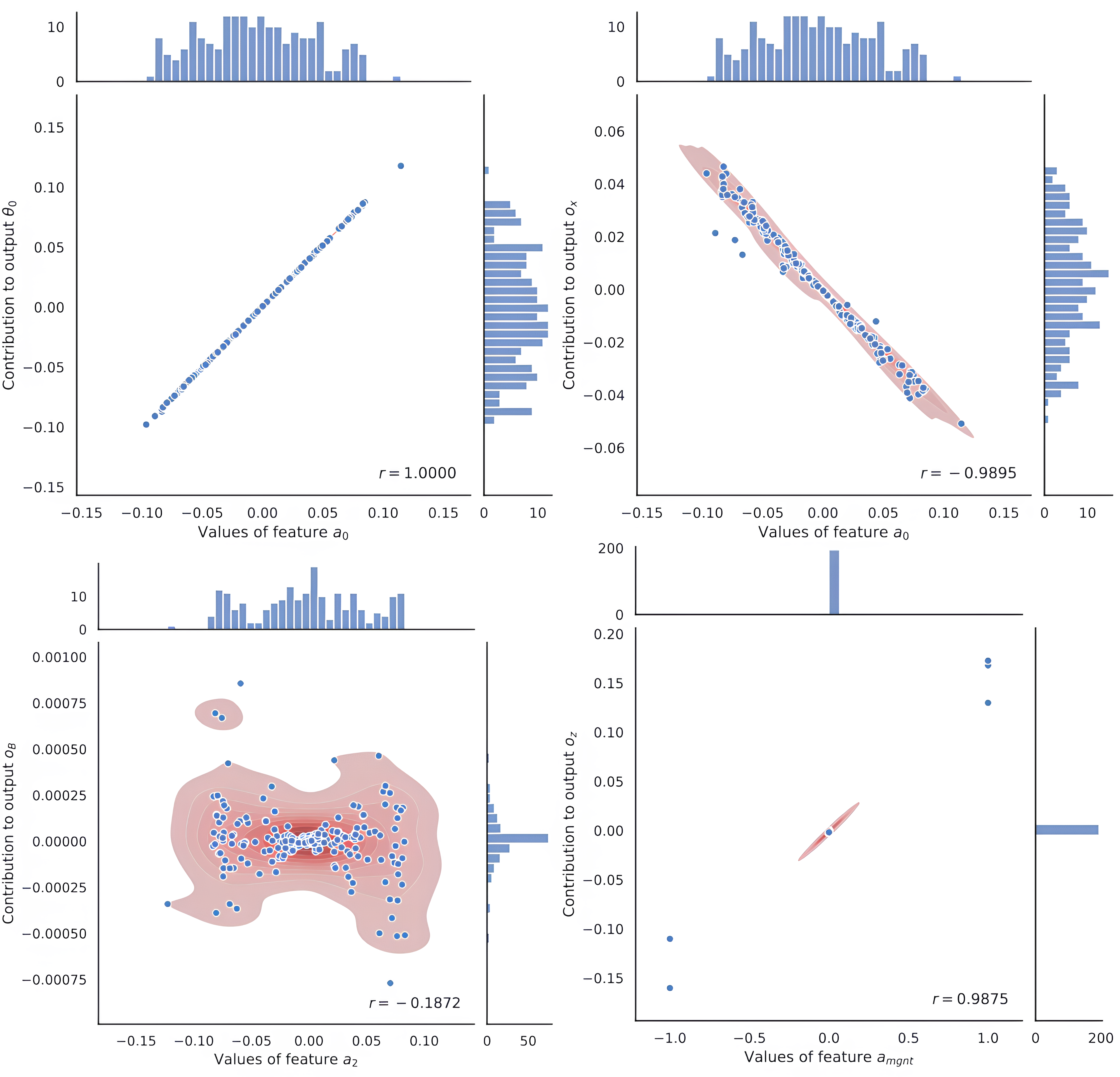
-
Všetky distribúcie rozložené podľa teplotnej mapy vyššie (obrázok)
⚠️ Grafika pri plnom otvorení v prehliadači môže zaberať 2-4 GB RAM a môže spôsobiť jeho spadnutie
{kind=link}